 EN
EN  it
it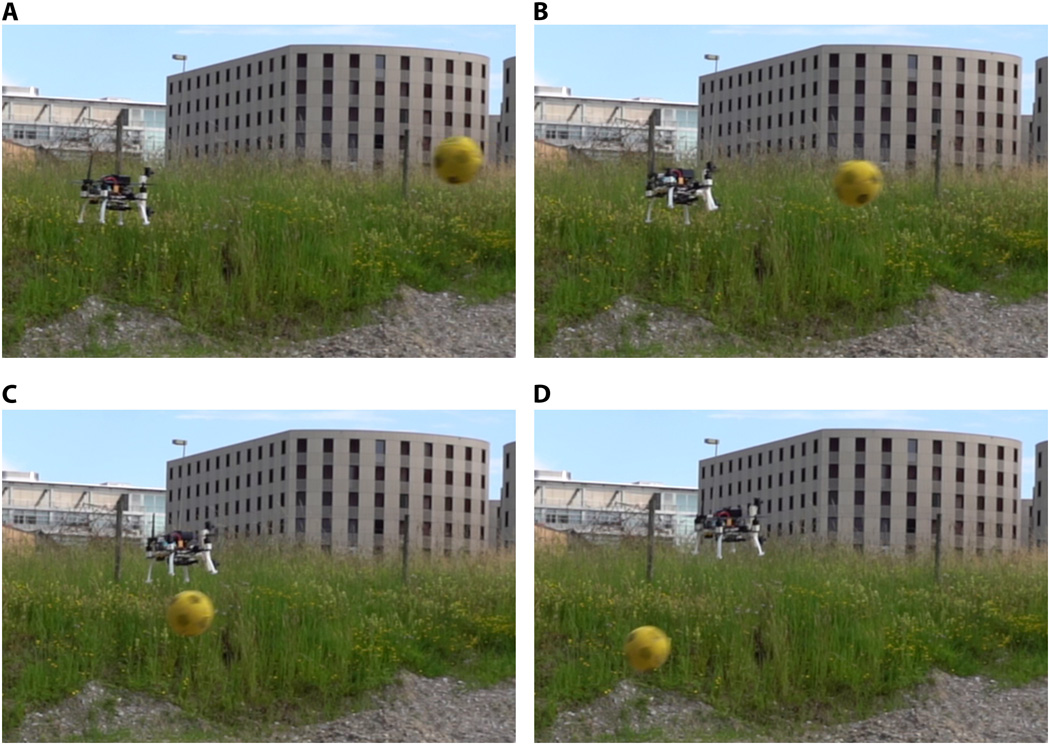
Presentati i risultati di una ricerca dell'Università di Zurigo
[fusion_separator style_type="none" hide_on_mobile="small-visibility,medium-visibility,large-visibility" class="" id="" sep_color="" top_margin="5" bottom_margin="5" border_size="" icon="" icon_circle="" icon_circle_color="" width="" alignment="center" /]Davide Falanga, Kevin Kleber e Davide Scaramuzza sono gli autori di una ricerca, pubblicata su Science Robotics, che dimostra come un drone autonomo sia in grado di evitare ostacoli multipli di diverse dimensioni e forme, a velocità relative fino a 10 metri/secondo, sia all'interno che all'esterno, utilizzando solo sensori e computer di bordo.
 La loro ricerca parte dalla considerazione che oggi i droni autonomi registrano tempi di reazione di decine di millisecondi, che non sono sufficienti per navigare velocemente in ambienti dinamici complessi (le ispezioni industriali ad esempio). Per evitare in modo sicuro oggetti in rapido movimento, i droni hanno bisogno di sensori e algoritmi a bassa latenza. Gli autori della ricerca sono partiti da metodologie innovative utilizzando sensori di visione dinamica (telecamere per eventi), ovvero sensori con tempi di reazione di microsecondi.
La loro ricerca parte dalla considerazione che oggi i droni autonomi registrano tempi di reazione di decine di millisecondi, che non sono sufficienti per navigare velocemente in ambienti dinamici complessi (le ispezioni industriali ad esempio). Per evitare in modo sicuro oggetti in rapido movimento, i droni hanno bisogno di sensori e algoritmi a bassa latenza. Gli autori della ricerca sono partiti da metodologie innovative utilizzando sensori di visione dinamica (telecamere per eventi), ovvero sensori con tempi di reazione di microsecondi.
Il loro approccio sfrutta le informazioni temporali contenute nel flusso di eventi per distinguere tra oggetti statici e dinamici e sfrutta una strategia rapida per generare i comandi motori necessari per evitare gli ostacoli che si avvicinano. Gli algoritmi di visione standard non possono essere applicati alle telecamere per eventi perché l'output di questi sensori non sono immagini ma un flusso di eventi asincroni che codificano le variazioni di intensità per pixel.

L'algoritmo messo a punto dal team di ricercatori ha una latenza complessiva di soli 3,5 millisecondi, che è sufficiente per un rilevamento affidabile e per evitare ostacoli in rapido movimento.
I risultati della ricerca assumono particolare rilevanza se consideriamo che i micro-veicoli aerei (MAVs) possono aprire nuovi mercati per un valore potenziale di diversi miliardi di dollari. Questi mercati includono l'imaging aereo [valore previsto di 4 miliardi di dollari entro il 2025], la logistica dell'ultimo miglio [90 miliardi di dollari entro il 2030] e la mobilità aerea [del valore di circa 8 miliardi di dollari nel 2030].
Sebbene il potenziale di mercato per i MAVs sia promettente, la sicurezza resta la sfida da vincere. Sono diversi gli episodi di droni schiantati al suolo a causa di oggetti lanciati durante eventi pubblici, o a causa di collisioni con volatili. Ecco perché, consentire ai MAVs di eludere gli oggetti in rapido movimento risulta fondamentale per l'utilizzo di mini droni aerei sicuri su larga scala.
[/fusion_builder_column][/fusion_builder_row][/fusion_builder_container]